







Controller con driver integrato per motori stepper Nema17/Nema23: funzionamento autonomo, zero programmazione
Hai bisogno di controllare un motore passo-passo senza dover scrivere righe di codice, senza Arduino e senza dipendere da un PC? Questo controller con driver integrato per motori stepper è la soluzione ideale: configuri tutto tramite potenziometro e pulsanti, avvii il motore e il gioco è fatto. Un unico modulo compatto che sostituisce due componenti separati, eliminando il disordine dei cablaggi.
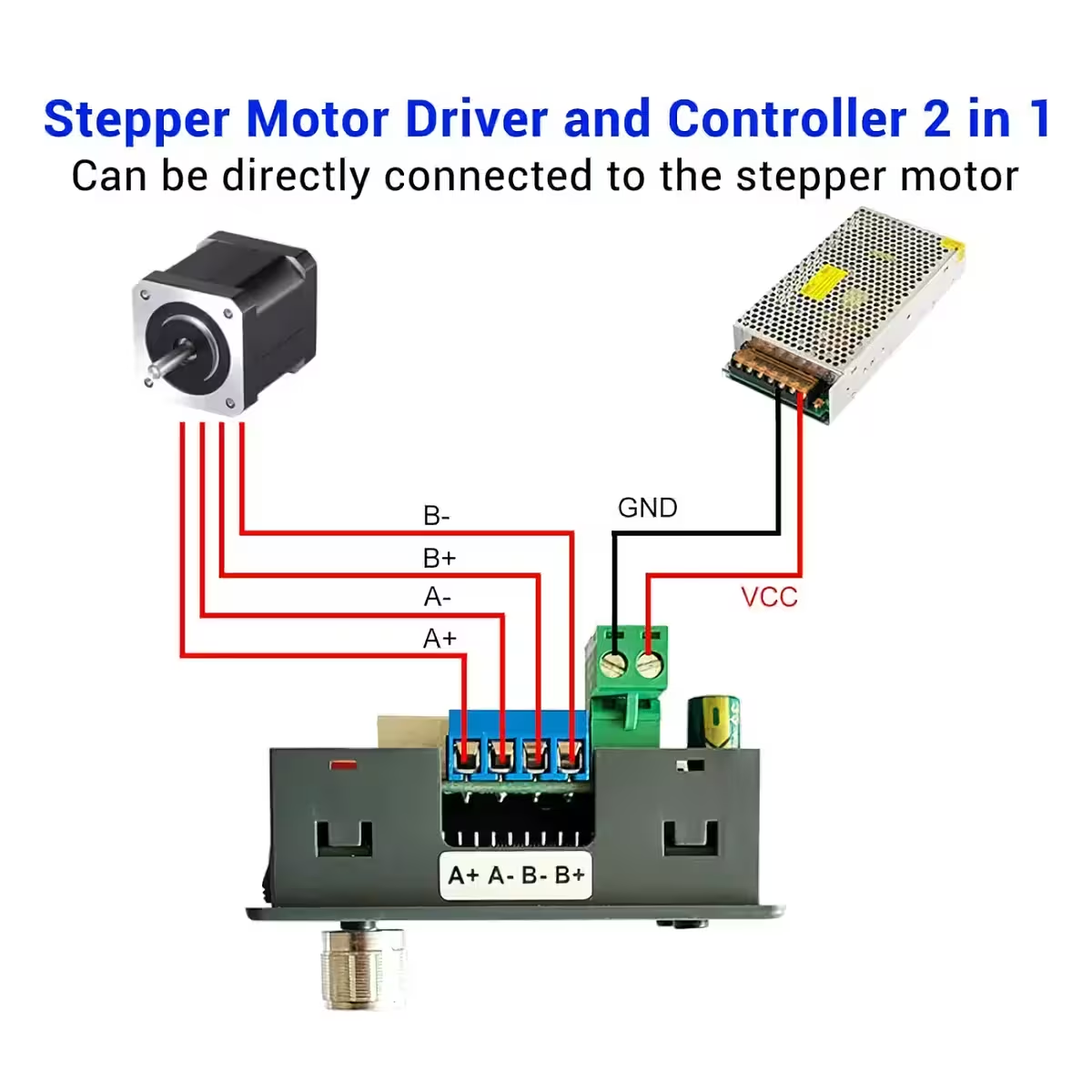
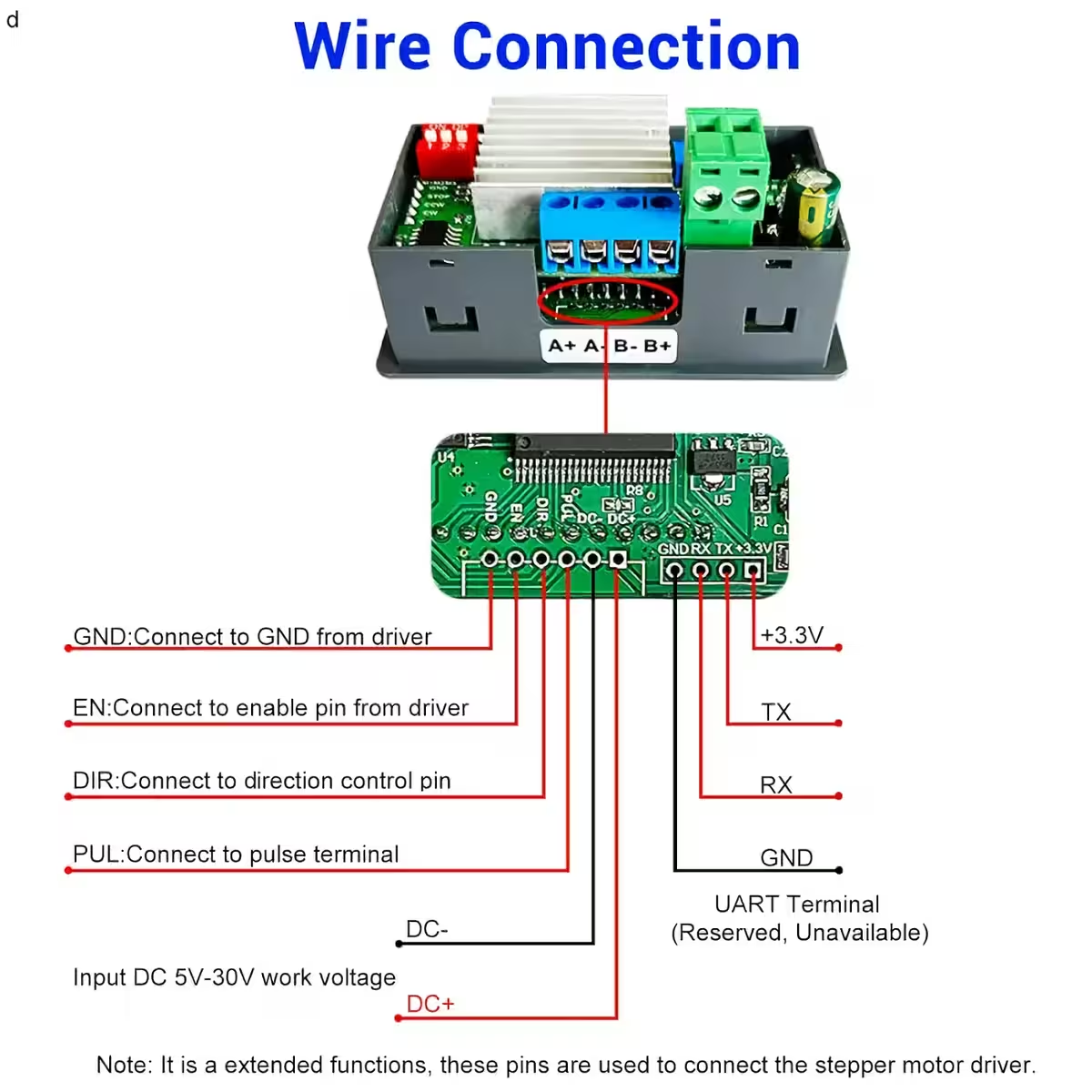
Nota: Il modulo controlla un singolo asse. È compatibile con motori stepper bifase a 4, 5, 6 o 8 fili. Può funzionare in modalità standalone o essere collegato a driver stepper esterni o PLC.
Perché scegliere questo controller? (Vantaggi principali):
- Indipendenza totale — non servono Arduino, Raspberry Pi o linguaggi di programmazione; configuri tutto direttamente dal modulo in meno di 5 minuti.
- 9 programmi di lavoro preconfigurati — dalla semplice rotazione a sequenze complesse con inversione automatica, ritardi e cicli infiniti.
- Display LCD HD con memoria — visualizza in tempo reale RPM, cicli e ritardi; la configurazione resta salvata anche dopo lo spegnimento.
- Avvio e arresto graduale — accelerazione e decelerazione regolabili su 100 livelli per eliminare gli shock meccanici che usurano gli ingranaggi.
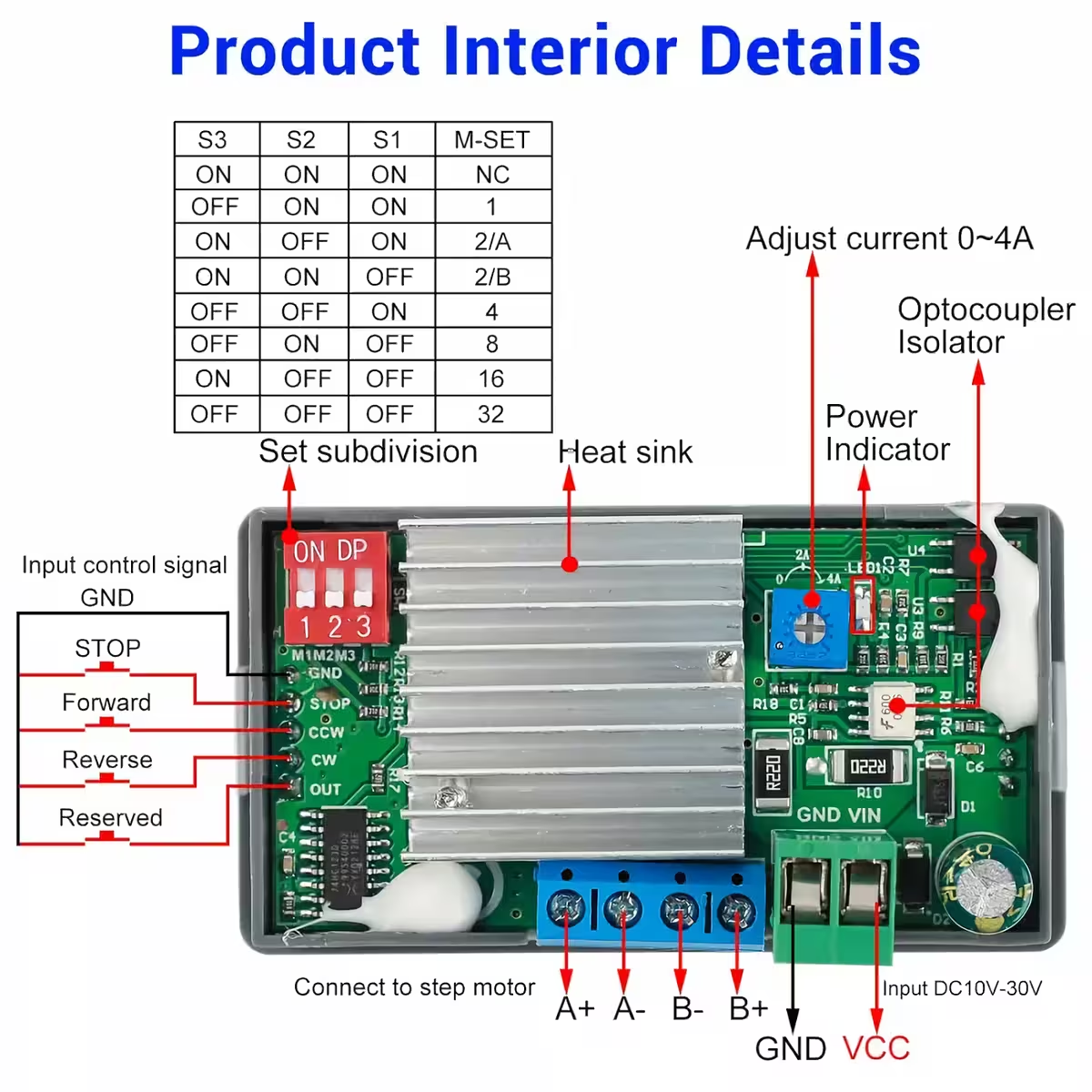
- Corrente in uscita fino a 4A — potenza sufficiente per motori Nema 23 sotto carico medio, senza necessità di driver esterni.
- Suddivisione fino a 1/32 — precisione di posizionamento adattabile, dai movimenti rapidi agli spostamenti ultra-precisi.
- Protezione contro l’inversione di polarità — un errore di cablaggio non danneggerà il modulo.
- Operatività tra –20°C e +85°C — robusto e affidabile in ambienti industriali, officine o contesti con umidità elevata.
Dettagli Tecnici e Prestazioni
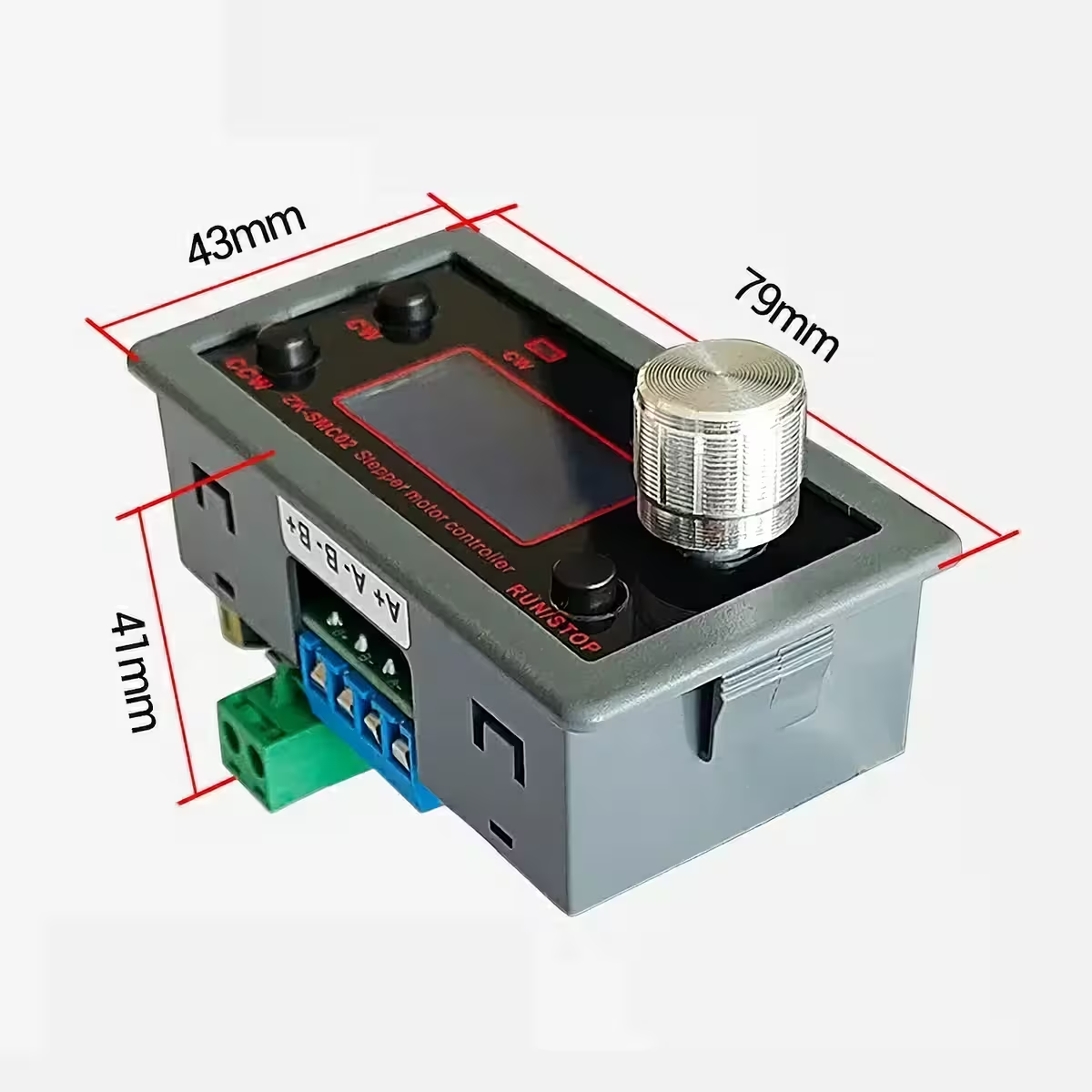
Il controller logico e il driver di potenza sono integrati in un unico blocco di 79 × 43 × 41 mm. La velocità è regolabile in continuo tra 0,1 e 999 RPM tramite potenziometro o parametri F-03/F-05, mentre il numero di impulsi per ciclo è impostabile fino a 9.999.999. Il parametro F-09 permette di calibrare con precisione gli impulsi per rotazione in base all’angolo del passo e alla suddivisione scelta (es. un motore da 1,8° con suddivisione 8 genera 1600 impulsi/giro, quindi F-09 = 160).
| Parametro | Valore / Dettaglio |
|---|---|
| Tensione di ingresso | DC 5V – 30V |
| Corrente di uscita massima | 4A |
| Motori compatibili | Nema 17 (42mm), Nema 23 (57mm) – 2 fasi, 4/5/6/8 fili |
| Assi controllati | 1 (asse singolo) |
| Velocità di rotazione | 0,1 – 999 RPM |
| Impulsi avanti / indietro | 1 – 9.999.999 |
| Numero cicli | 1 – 9.999 o ciclo infinito |
| Ritardo avanti / indietro | 0,0 – 999,9 secondi (±0,2s) |
| Suddivisione | 1 / 2 / 4 / 8 / 16 / 32 |
| Programmi di lavoro (P01–P09) | 9 modalità configurabili |
| Controllo accelerazione / decelerazione | Sì (F-12: livello 1–100) |
| Protezione inversione polarità | Sì |
| Modalità operative | Automatica / Manuale / Configurazione |
| Display | LCD HD (RPM, cicli, ritardo) |
| Temperatura di esercizio | –20°C a +85°C |
| Umidità di esercizio | 5% – 95% RH |
| Dimensioni modulo | 79 × 43 × 41 mm |
Istruzioni di Programmazione e Utilizzo
Interfaccia di esecuzione (modalità normale):
- La prima riga dell’LCD mostra la velocità in RPM; la seconda riga mostra il ritardo o il numero di cicli (configurabile tramite F-10).
- Il pulsante CW avvia la rotazione oraria; il pulsante CCW avvia la rotazione antioraria.
- Il pulsante RUN/STOP avvia o arresta il motore (arresto graduale o immediato, in base a F-11).
- Il potenziometro regola la velocità in tempo reale in entrambi i sensi.
Accesso al menu parametri (F-01 – F-13):
- Tenere premuto il potenziometro per più di 3 secondi per accedere alla modalità impostazioni.
- Ruotare il potenziometro per navigare tra i parametri F-01 → F-13; il parametro selezionato lampeggerà.
- Premere il potenziometro per selezionare il valore e modificarlo ruotandolo.
- Premere RUN/STOP per confermare il valore inserito.
- Tenere premuto il potenziometro per più di 3 secondi per salvare e uscire dal menu.
Tabella parametri F-01 – F-13:
| Parametro | Funzione | Intervallo | Default |
|---|---|---|---|
| F-01 | Selezione modalità (P01–P09) | P01 – P09 | P01 |
| F-02 | Impulsi direzione avanti | 1 – 9.999.999 | 1600 |
| F-03 | Velocità avanti (RPM) | 0,1 – 999,9 | 10 |
| F-04 | Impulsi direzione indietro | 1 – 9.999.999 | 1600 |
| F-05 | Velocità indietro (RPM) | 0,1 – 999,9 | 10 |
| F-06 | Numero cicli (‘—-‘ = infinito) | 0 – 9.999 / ∞ | 1 |
| F-07 | Ritardo dopo movimento avanti (s) | 0,0 – 999,9 | 0 |
| F-08 | Ritardo dopo movimento indietro (s) | 0,0 – 999,9 | 0 |
| F-09 | Impulsi per giro completo (unità = 10) | 1 – 9.999 | 160 |
| F-10 | Configurazione LCD: 0=ritardo; 1=cicli | 0 o 1 | 0 |
| F-11 | Comportamento RUN/STOP: 0=decelera; 1=stop immediato | 0 o 1 | 0 |
| F-12 | Livello accelerazione/decelerazione (1-100) | 1 – 100 | 20 |
| F-13 | Indirizzo dispositivo | 1 – 255 | 1 |
Modalità di lavoro P01 – P09 (F-01)
| Modo | Descrizione |
|---|---|
| P01 | Controllo manuale tramite potenziometro: orario (CW), antiorario (CCW). Pulsanti inattivi. |
| P02 | Rotazione basata su impulsi F-02/F-04; stop dopo ogni ciclo; reset manuale. |
| P03 | Rotazione e stop alternato. Arrestare il motore prima di cambiare direzione. |
| P04 | Sequenza: F-02 → stop F-07 → loop F-06 (avanti); F-04 → stop F-08 → loop (indietro). |
| P05 | Rotazione F-02/F-04 → stop → inversione direzione → loop F-06. |
| P06 | Sequenza completa: F-02 → stop F-07 → inversione F-04 → stop F-08 → loop F-06. |
| P07 | Rotazione F-02/F-04 → stop → ritorno all’origine (senza numero cicli fisso). |
| P08 | Rotazione basata su timer: F-07 → stop F-08 → loop F-06. |
| P09 | Sequenza completa: avanti F-02 → stop F-07 → indietro F-04 → stop F-08 → loop F-06. |
Contenuto della confezione
- 1 × Controller con driver integrato per motori stepper (Nema17/Nema23)
- 1 × Cavo di collegamento motore
Domande Frequenti
È compatibile con motori Nema 17 e Nema 23?
Sì. Funziona con motori stepper bifase Nema 17 (42mm) e Nema 23 (57mm), a 4, 5, 6 o 8 fili.
Serve un microcontrollore come Arduino?
No. Il modulo è completamente autonomo. Può essere collegato a un PLC o driver esterno, ma non è obbligatorio.
Posso controllare più assi contemporaneamente?
No, il modulo controlla un solo asse. Per più assi è necessario un modulo per ogni motore.
Come calcolo il valore per F-09?
Formula: (360 ÷ angolo_passo) × suddivisione ÷ 10. Esempio: motore 1,8° con suddivisione 8 → (360 ÷ 1,8) × 8 ÷ 10 = 160. Impostare F-09 = 160.
Video di presentazione
Galleria fotografica












Recensioni
Ancora non ci sono recensioni.