



Controller per inversione motore DC – controllo del movimento avanti/indietro senza componenti esterni
Hai bisogno di gestire un attuatore lineare, un meccanismo reversibile o un progetto DIY che richieda un controllo preciso della direzione? Senza un modulo dedicato, finiresti per complicare il circuito con relè, transistor e cablaggi complessi. Questo controller per motori DC risolve tutto in un unico modulo compatto: basta collegare l’alimentazione, il motore e i pulsanti per essere operativi in pochi minuti.
Nota: Il motore riceve la stessa tensione della sorgente di alimentazione. La tensione non è regolabile tramite questo controller.
Perché scegliere questo modello? (Vantaggi chiave):
- Ampio range di tensione: 4–40V DC — compatibile con batterie LiPo, alimentatori da banco o industriali, senza necessità di modifiche
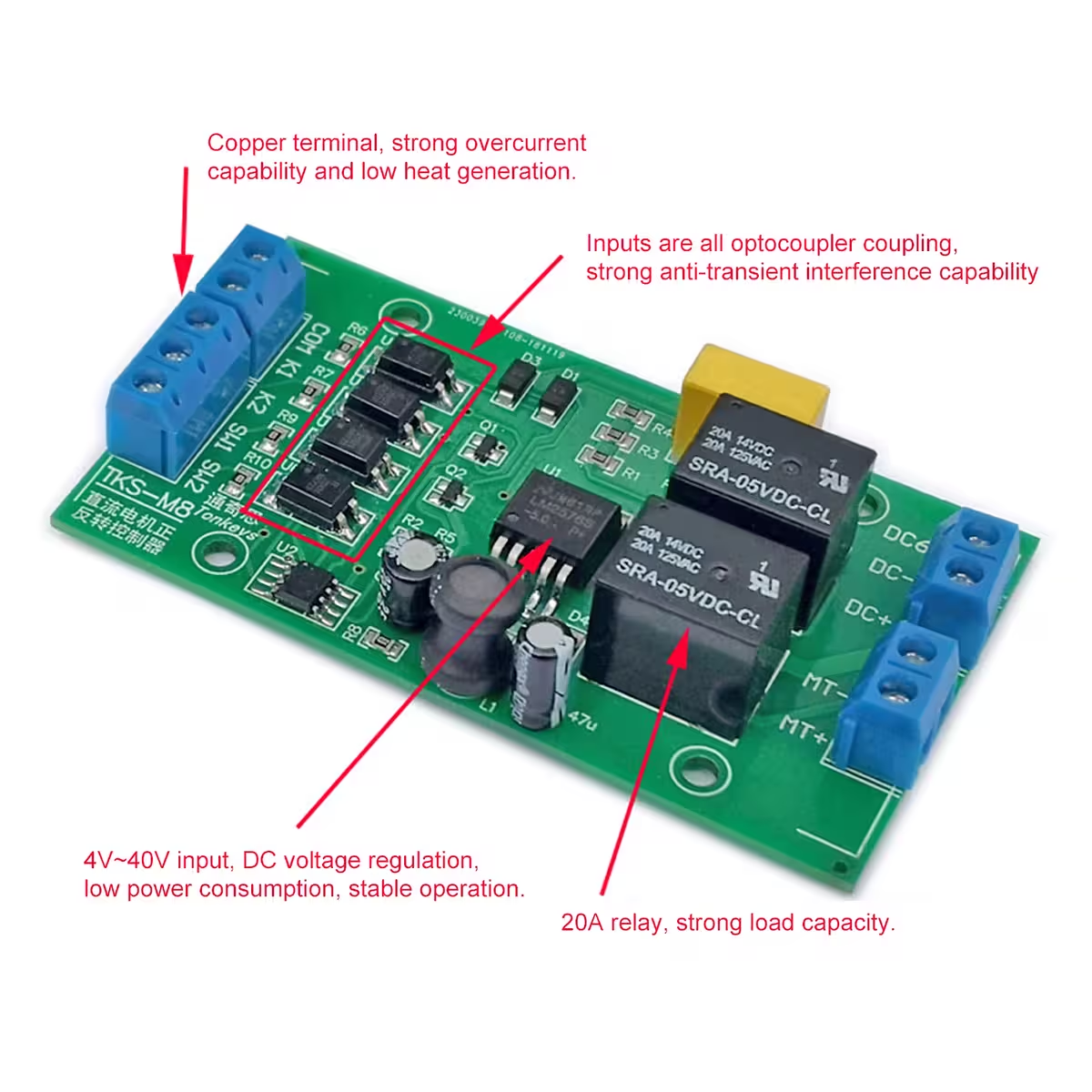
- Corrente di uscita fino a 20A — gestisce motori con elevati picchi di spunto, adatto per carichi fino a ~80W
- Due modalità selezionabili: PO e P1 — scegli tra auto-mantenimento (avvio con impulso breve) e jog (attivo solo finché tieni premuto), in base all’applicazione
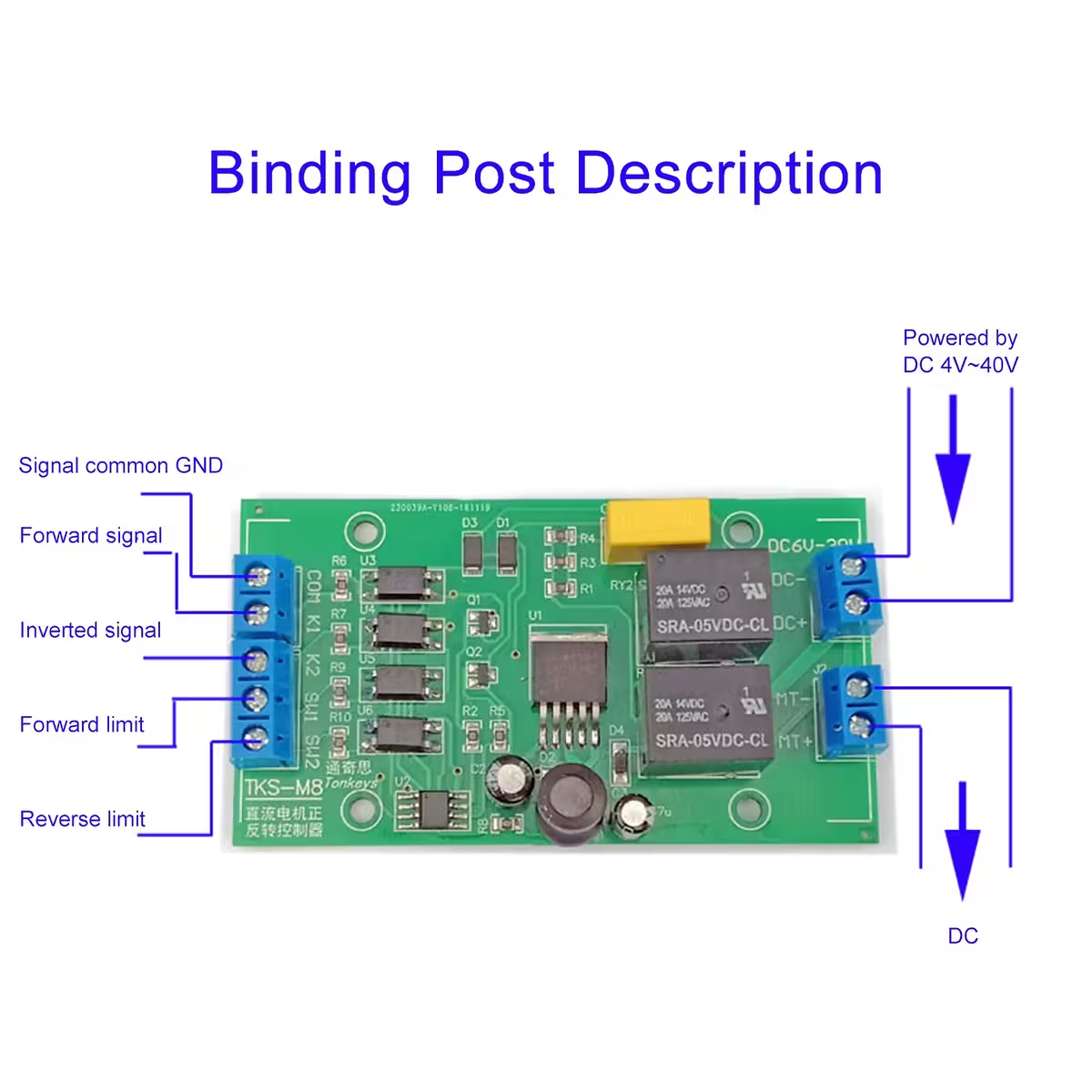
- Ingressi universali active-low — collega direttamente pulsanti semplici, finecorsa meccanici NO o sensori NPN a 3 fili, senza resistenze o logiche aggiuntive
- Finecorsa integrati SW1/SW2 — arresto automatico a fine corsa, per eliminare il rischio di blocco meccanico o sovraccarico
- Durata operativa >150.000 cicli — affidabilità garantita per applicazioni con cicli ripetitivi quotidiani
- Basso consumo energetico: 0,6W attivo / 0,1W standby — non scarica la batteria quando il sistema è in attesa
Dettagli e Prestazioni
Il controller utilizza un’architettura basata su ingressi active-low: un ingresso si attiva quando la tensione scende sotto i 2V. Ciò significa che pulsanti semplici, finecorsa meccanici NO (normalmente aperti) e sensori NPN-NO a 3 fili si collegano direttamente, senza componenti intermedi.
Il tempo di risposta è di ≈20ms per i comandi K1/K2 e ≈50ms per i finecorsa SW1/SW2 — abbastanza rapido per applicazioni dinamiche e sufficientemente stabile per evitare azionamenti accidentali.
A tensioni più elevate, la corrente raccomandata diminuisce: a 12V puoi utilizzare fino a 20A, mentre a 24V si consiglia di limitare a ~10A per un funzionamento termico sicuro nel lungo periodo. Utilizza sempre un fusibile adeguatamente dimensionato e cavi idonei al carico.
| Parametro | Valore / Dettaglio |
|---|---|
| Tensione di lavoro | DC 4–40V (consigliato 6–36V) |
| Corrente massima uscita | fino a 20A (a 12V) |
| Potenza motore consigliata | fino a ~80W |
| Consumo modulo (attivo) | circa 0,6W |
| Consumo modulo (standby) | circa 0,1W |
| Tipo segnale ingresso | Active-low (attivo a tensione < 2V) |
| Tempo risposta K1/K2 | ≈ 20ms |
| Tempo risposta SW1/SW2 | ≈ 50ms |
| Modalità di funzionamento | PO (auto-mantenimento) / P1 (jog) |
| Durata operativa | >150.000 cicli |
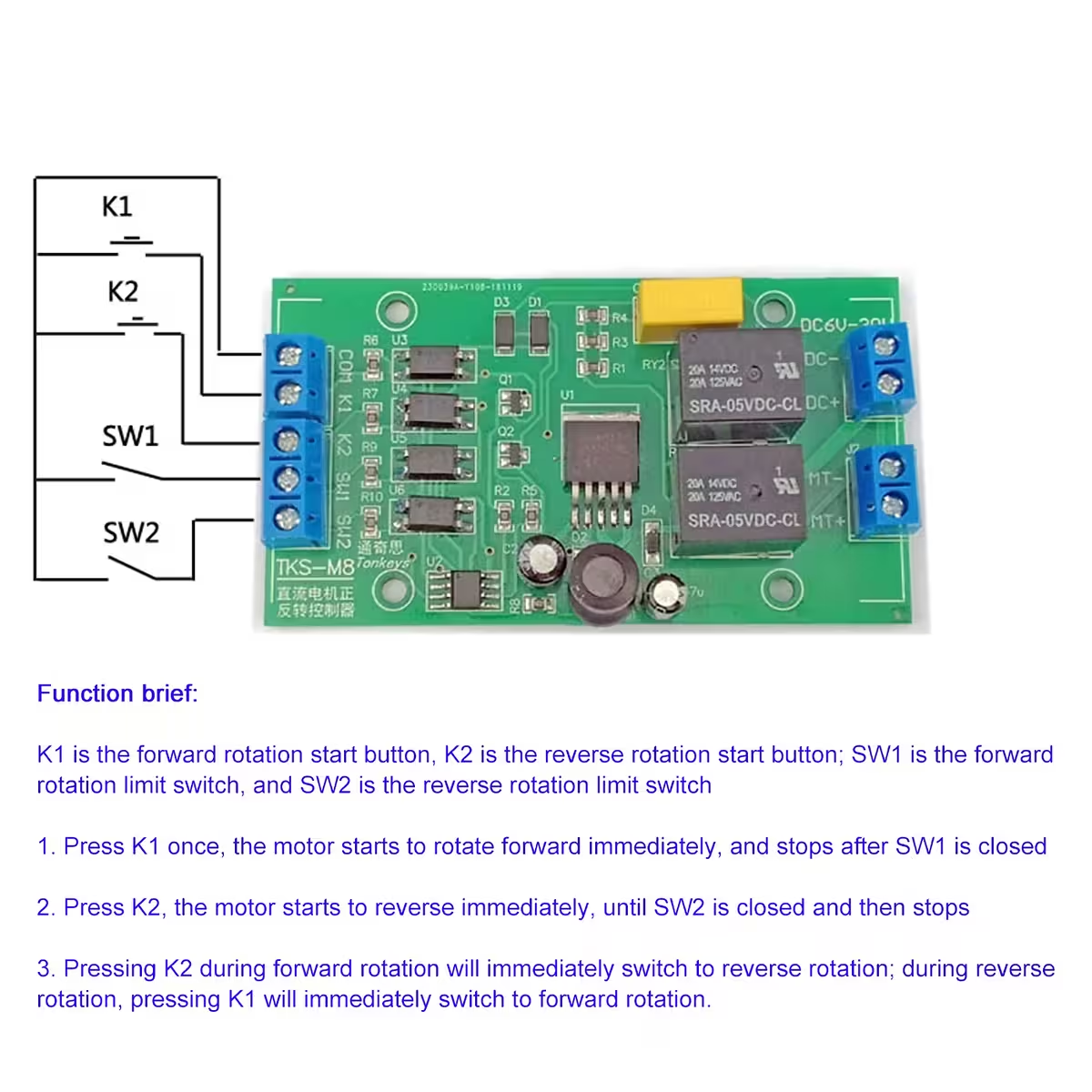
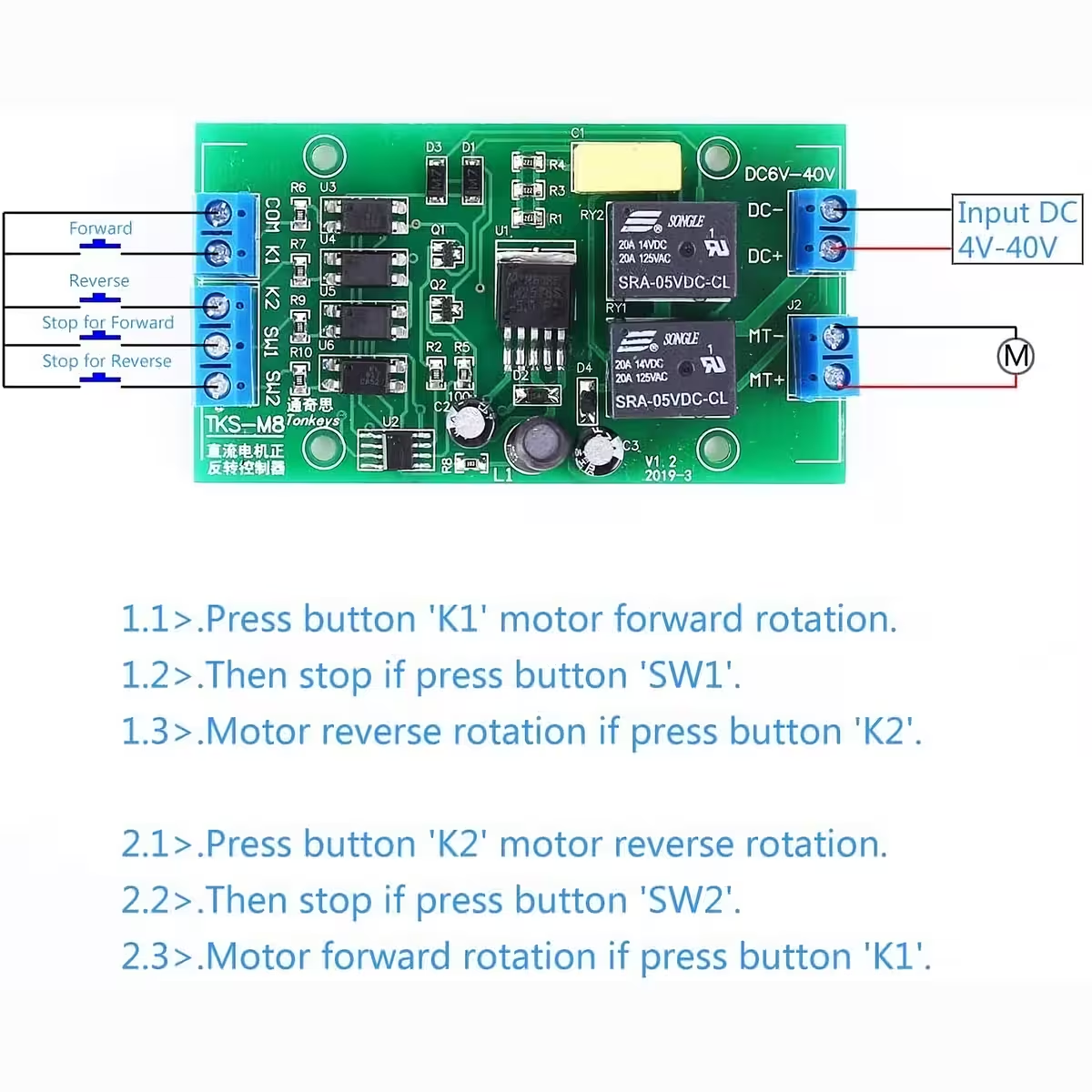
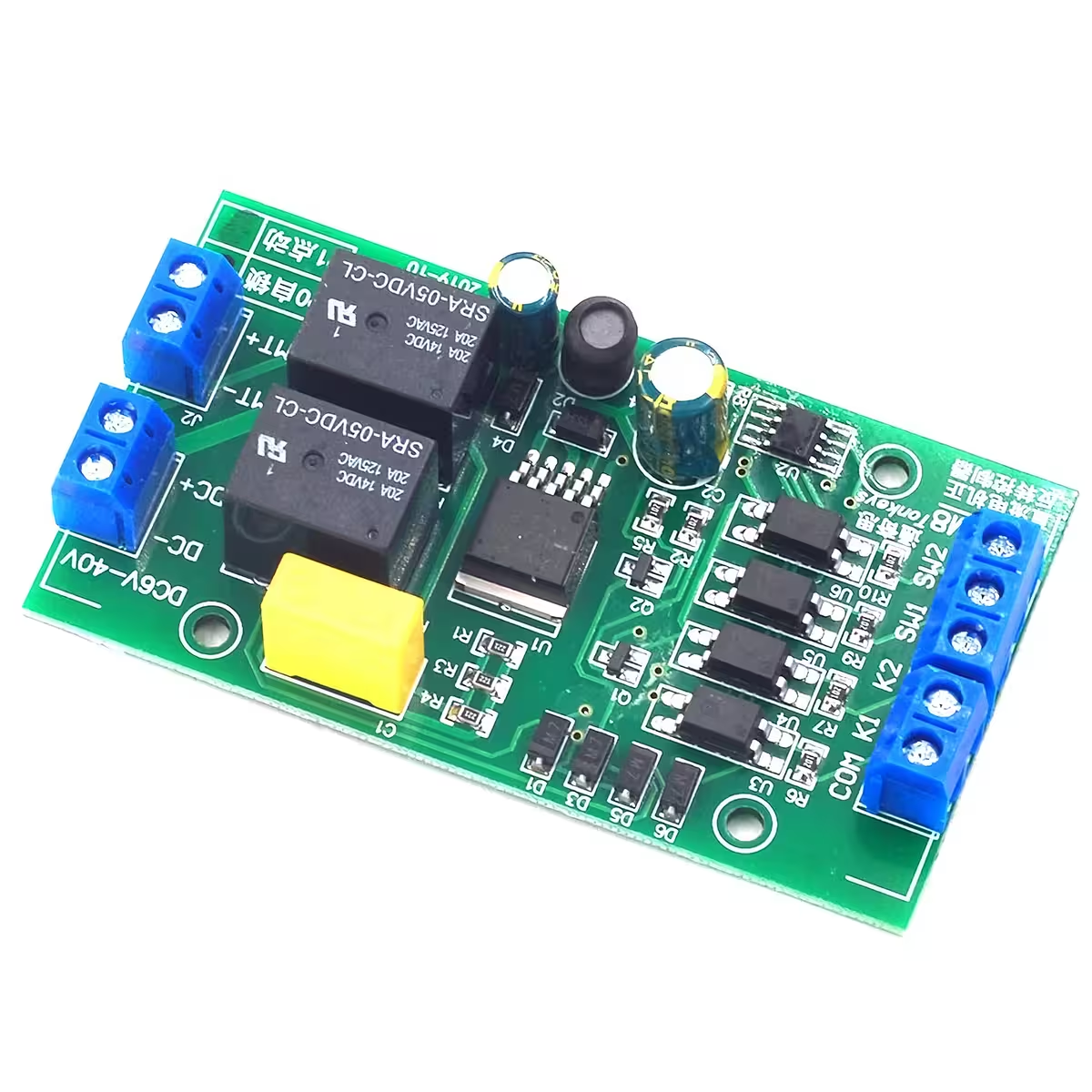
| Ingresso K1 | Comando marcia avanti (active-low) |
| Ingresso K2 | Comando marcia indietro (active-low) |
| SW1 | Finecorsa marcia avanti (consigliato NO) |
| SW2 | Finecorsa marcia indietro (consigliato NO) |
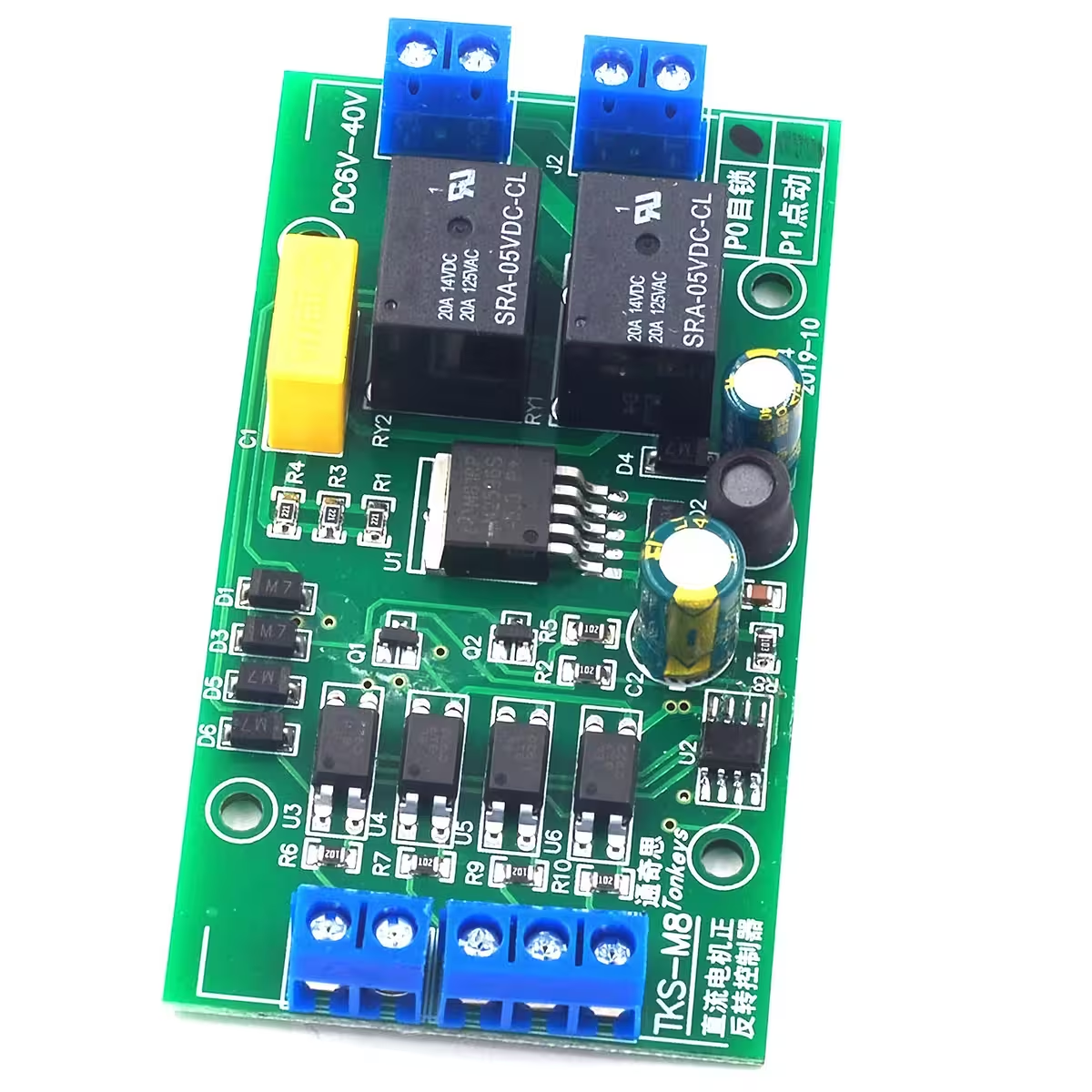
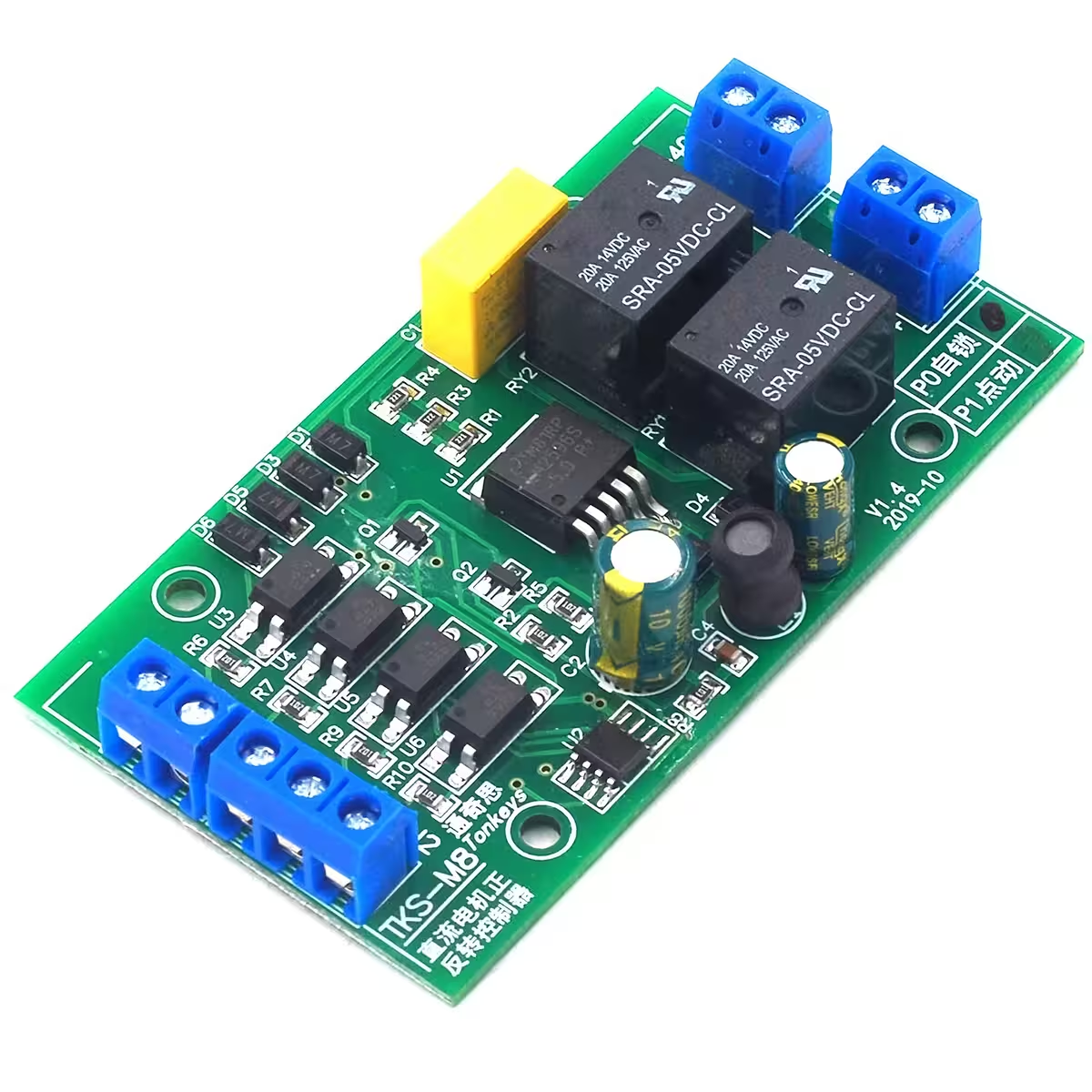
| VIN+ / VIN- | Alimentazione modulo DC 4–40V |
| Motor+ / Motor- | Uscita verso motore DC |
Istruzioni di Programmazione e Utilizzo
Modalità PO (Auto-mantenimento): Un breve impulso su K1 o K2 avvia il motore. Questo continuerà a funzionare autonomamente fino all’attivazione del finecorsa corrispondente o alla ricezione del comando opposto. Ideale per automazioni.
Modalità P1 (Jog): Il motore rimane attivo solo per il tempo in cui il comando K1 o K2 resta premuto. Ideale per regolazioni fini e posizionamento manuale.
- Collega l’alimentatore a VIN+ e VIN– (rispetta la polarità).
- Collega il motore DC a Motor+ e Motor–.
- Seleziona la modalità di funzionamento: PO per auto-mantenimento o P1 per jog.
- Collega i pulsanti o i segnali di comando a K1 (avanti) e K2 (indietro) — ingressi active-low.
- Collega opzionalmente i finecorsa meccanici o i sensori NPN-NO a SW1 și SW2.
- Per movimento automatico ciclico A→B→A: collega le uscite degli interruttori NO dalla posizione A a K1 e dalla posizione B a K2, lasciando SW1/SW2 scollegati.
- Per integrazione Arduino: collega il GND di Arduino al GND del controller, il pin digitale per l’avanti a K1 e quello per l’indietro a K2. Imposta i pin come OUTPUT e scrivi LOW per l’attivazione.
- Verifica la corrente di spunto del motore e installa un fusibile dimensionato correttamente sulla linea di alimentazione.
Contenuto della confezione
- 1 × Controller per inversione motore DC (Forward / Reverse), modalità PO/P1
Domande Frequenti
Cosa significa active-low e perché è importante?
L’ingresso si attiva quando la tensione scende sotto i 2V, ovvero quando viene collegato a massa (GND). Pulsanti semplici, finecorsa meccanici NO e sensori NPN funzionano esattamente così. Non servono resistenze aggiuntive o logiche di inversione.
Qual è la differenza tra la modalità PO e la modalità P1?
Nella modalità PO, un impulso breve su K1 o K2 avvia il motore che prosegue autonomamente fino al finecorsa o al comando opposto — utile per automazioni. Nella modalità P1, il motore gira solo finché il comando è mantenuto attivo — utile per regolazioni precise o controllo manuale.
Posso collegare questo controller direttamente ad Arduino?
Sì. Collega il GND di Arduino al GND del controller e usa due pin digitali impostati come OUTPUT. Quando il pin è LOW, il comando è attivo. Arduino gestisce la logica, il controller gestisce la potenza — senza componenti intermedi.
Posso usare finecorsa con contatto normalmente chiuso (NC)?
Il controller è ottimizzato per finecorsa NO (normalmente aperti). I contatti NC invertono la logica e possono causare comportamenti indesiderati. Utilizza sempre contatti NO per SW1 e SW2.
È necessario un dissipatore alla massima corrente?
Con correnti vicine ai 20A o in cicli intensivi, assicurati che ci sia una ventilazione adeguata e monitora la temperatura del modulo. Per applicazioni continue sotto carico elevato, un piccolo dissipatore o una ventilazione forzata possono prolungare significativamente la vita del dispositivo.
Come creo un movimento automatico ciclico senza timer?
Collega gli interruttori NO dalla posizione A a K1 e dalla posizione B a K2, lasciando SW1 e SW2 scollegati. Al raggiungimento di ogni finecorsa, l’interruttore attiva automaticamente il comando per il senso opposto — il motore oscillerà continuamente senza intervento esterno.
Video di presentazione
Galleria fotografica












Recensioni
Ancora non ci sono recensioni.